





Noticias
Por qué la simulación patelar importa en la TKA — y cómo mejora los resultados del paciente
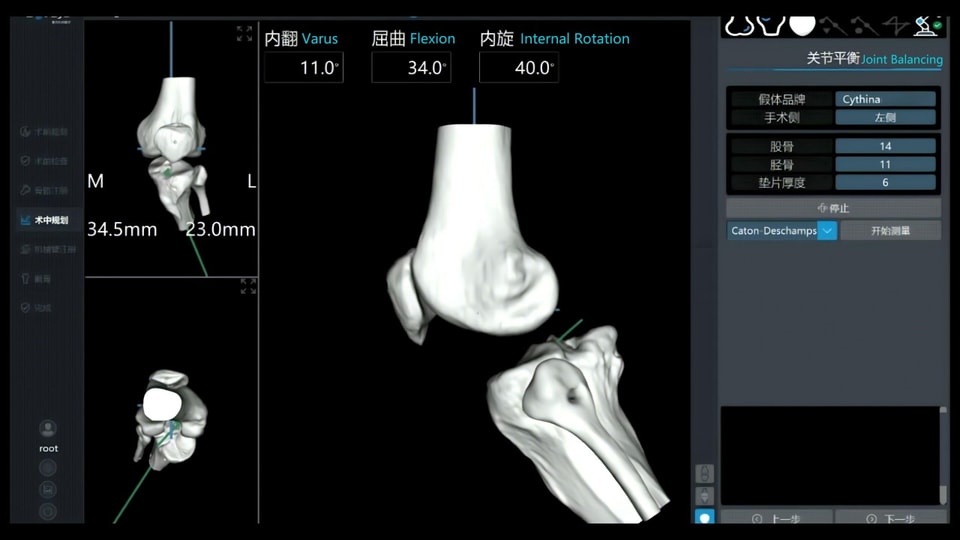
Cuando hablamos del éxito en la artroplastia total de rodilla (TKA), la conversación suele centrarse en la alineación, la longevidad del implante o el equilibrio de los tejidos blandos. Pero hay un factor que determina silenciosamente si un paciente sale del hospital satisfecho o frustrado: la articulación patelofemoral. Una rótula olvidada puede echar por tierra una prótesis de rodilla por lo demás perfecta. Por eso la simulación patelar —la capacidad de modelar y predecir virtualmente el seguimiento patelar y las fuerzas de contacto antes de realizar un solo corte óseo— ha pasado de ser un valor añadido a una necesidad clínica. El problema clínico que no podemos ignorar El dolor anterior de rodilla sigue siendo una de las complicaciones más comunes tras una TKA, y afecta hasta al 20–30% de los pacientes en algunos estudios. Conduce a insatisfacción, cirugías de revisión y mayores costes sanitarios. ¿La causa raíz? A menudo, una discordancia entre la geometría del implante y la biomecánica patelofemoral nativa del paciente. Las herramientas tradicionales de planificación quirúrgica tratan la rótula como una cuestión secundaria. Pero cada paciente tiene una altura patelar, una morfología de la tróclea y un ángulo Q únicos. Sin una simulación patelar específica del paciente, básicamente estamos adivinando cómo se desplazará la rótula en el postoperatorio. Cómo la simulación patelar cambia las reglas del juego La simulación patelar permite al equipo quirúrgico: Visualizar en tiempo real el seguimiento patelar a lo largo de todo el rango de movimiento, desde la extensión hasta la flexión profunda. Identificar posibles casos de sobrecarga o infrareducción del compartimento patelofemoral antes de realizar resecciones óseas irreversibles. Optimizar la rotación del implante y el tamaño del componente femoral para restaurar la tróclea nativa. Reducir las tasas de liberación del retináculo lateral mediante un equilibrio proactivo de las fuerzas patelofemorales. ¿El resultado? Una recuperación posoperatoria más fluida, menos dolor anterior de rodilla y una rodilla que se siente más natural para el paciente. La propuesta de valor para cirujanos y hospitales Para los cirujanos, la simulación patelar reduce la improvisación intraoperatoria y el riesgo de revisión. Para los hospitales y los sistemas sanitarios, contribuye a mayores índices de satisfacción del paciente, estancias hospitalarias más cortas y menores tasas de reingreso a 90 días: métricas clave en los modelos de atención basada en el valor. ¿Y los pacientes? Vuelven a hacer senderismo, arrodillarse y jugar con sus nietos sin ese molesto dolor anterior. Mirando al futuro: la simulación como nuevo estándar asistencial Estamos entrando en una era en la que la biomecánica predictiva definirá la excelencia quirúrgica. Del mismo modo que la plantificación preoperatoria de las prótesis de cadera se convirtió en algo universal, la simulación patelofemoral está en camino de convertirse en un paso ineludible en la cirugía moderna de rodilla. En su práctica, ¿cuál es el mayor obstáculo para gestionar el seguimiento patelar? ¿La experiencia o la tecnología? Si ha visto el impacto de la simulación en su práctica, o si desea explorar más a fondo esta tecnología, empecemos una conversación.
Más allá del sistema cerrado: el cambio estratégico hacia la plataforma abierta y la precisión submilimétrica en ortopedia
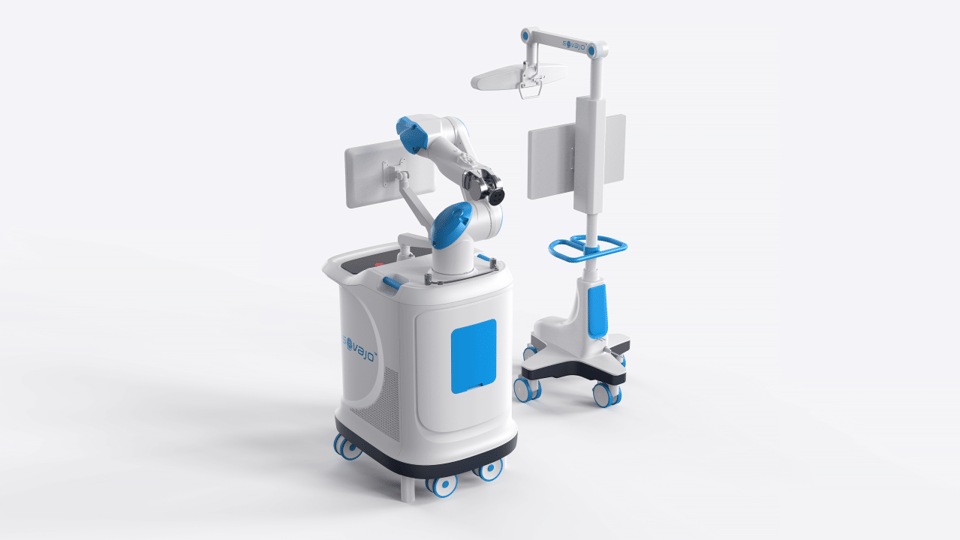
La rápida expansión de la artroplastia total de rodilla asistida por robot (TKA) ha planteado a los servicios quirúrgicos una compleja gama de opciones tecnológicas. Más allá del atractivo comercial inicial, la utilidad clínica de una plataforma robótica viene definida por su arquitectura mecánica, su modalidad de ejecución y su integración en el ecosistema protésico existente. Esta revisión describe los parámetros técnicos críticos que cirujanos y administradores hospitalarios deben evaluar para garantizar el éxito clínico y operativo a largo plazo. 1. El panorama global: arquetipos arquitectónicos El mercado actual está dividido entre plataformas globales consolidadas e innovadores emergentes de alta precisión. Estos sistemas pueden clasificarse según su filosofía mecánica: Sistemas de navegación de legado: Plataformas consolidadas que se centran en la alineación y el posicionamiento, y que a menudo utilizan un tamaño reducido o diseños montados sobre la mesa. Plataformas semiactivas integradas: Sistemas que utilizan un brazo robótico dedicado para asistir o realizar la resección ósea. Dentro de esta categoría, una nueva generación de sistemas de alta rigidezcomo Sovajoestá desafiando los primeros estándares del sector al priorizar la estabilidad mecánica como base de la precisión. 2. Criterios de evaluación críticos para la adquisición quirúrgica I. Precisión de registro: el umbral submilimétrico Aunque la primera generación de asistentes robóticos estableció un estándar de precisión del sector de aproximadamente 0,3 mm a 0,5 mmlos avances en ingeniería han llevado el límite aún más lejos. Relevancia clínica: Los cirujanos deben distinguir entre «precisión de planificación estática» y «precisión de registro activa». Las plataformas de alta rigidez más recientes han documentado una precisión de registro de 0,15 mm. Esta reducción del margen de error es vital en casos complejos en los que la morfología ósea está alterada, ya que garantiza que la ejecución física coincida con el plan digital con la máxima fidelidad posible. II. Modalidad de ejecución: sistemas semiactivos frente a navegación pasiva Una distinción fundamental radica en cómo el robot interactúa con el instrumental quirúrgico: Navegación pasiva (la «guía robótica»): El robot posiciona una guía de corte, pero el cirujano opera la sierra manualmente. Aunque esto garantiza la alineación, no ofrece protección frente a desviaciones manuales ni a lesiones de tejidos blandos durante el corte. Ejecución semiactiva (instrumental integrado): Las plataformas avanzadas utilizan un brazo robótico que controla directamente el instrumento (por ejemplo, una sierra oscilante). III. Filosofía mecánica: arquitecturas de brazo de alta rigidez frente a brazo flexible La construcción física del brazo robótico influye de forma significativa en su rendimiento bajo el esfuerzo de la resección ósea. Brazos flexibles y ligeros: A menudo diseñados para ofrecer portabilidad, estos brazos pueden requerir fijadores invasivos en la pierna para compensar el posible movimiento y la falta de resistencia inherente durante el corte. Brazos de alta rigidez: Al utilizar un brazo robusto y de alta rigidez, sistemas como Sovajo eliminan las microvibraciones durante el corte activo. IV. Arquitectura del ecosistema: plataforma abierta vs. sistema cerrado La elección entre sistemas propietarios y agnósticos es un factor clave del ROI a largo plazo: Sistemas cerrados: Están vinculados a los implantes patentados de un fabricante específico. Aunque integrados, limitan la elección clínica del cirujano y pueden aumentar la vulnerabilidad de la cadena de suministro del hospital. Plataformas abiertas (agnósticas a los implantes): Los líderes emergentes están adoptando una filosofía de plataforma abierta. Sinergia: Un sistema compatible con múltiples marcas líderes de implantes (diversas líneas internacionales) permite al hospital aprovechar su inventario existente. Esto protege los márgenes del distribuidor y permite una selección de implantes específica para cada paciente, sin restricciones robóticas. Conclusión: Definiendo el estándar del futuro Para un departamento quirúrgico, la inversión robótica ideal es aquella que ofrece un enfoque de ejecución sin concesiones. Una plataforma que combina precisión submilimétrica (0,15 mm), la seguridad activa de un sistema semiactivo, y la estabilidad mecánica de un brazo de alta rigidez representa la cima actual de la ingeniería ortopédica. Cuando estas características se integran en una arquitectura de plataforma abierta, el resultado es un sistema que mejora los resultados clínicos al tiempo que mantiene la máxima flexibilidad operativa.
La revolución del reemplazo articular: por qué la «rigidez» es el nuevo estándar de oro en robótica ortopédica
Durante años, los cirujanos ortopédicos han adoptado la asistencia robótica para mejorar los resultados de TKA/THA. Sin embargo, muchos sistemas de primera generación aportaron también sus propias frustraciones clínicas, especialmente los que utilizaban brazos robóticos «flexibles/ligeros». Los puntos débiles más comunes para los cirujanos: ❌ Inestabilidad de precisión: los brazos flexibles suelen sufrir microvibraciones durante el corte óseo activo, lo que provoca errores de osteotomía que pueden superar los 2–3 mm. ❌ Complejidad del procedimiento: para compensar la flexibilidad del brazo, estos sistemas requieren fijadores/inmovilizadores invasivos de la pierna para garantizar que el paciente no se mueva ni un centímetro. Esto añade tiempo quirúrgico, incrementa el traumatismo de los tejidos blandos y complica el flujo de trabajo. ❌ Problemas de previsibilidad: una rigidez inconsistente significa resultados inconsistentes. La solución de Sovajo: ingeniería de estabilidad con brazos de alta rigidez 🎯 En Sovajo, creemos que el robot debe adaptarse al cirujano, no al revés. Nuestro sistema de nueva generación utiliza un brazo robótico médico de alta rigidez combinado con algoritmos patentados de control del movimiento para resolver estos problemas heredados: ✅ Precisión submilimétrica: nuestro brazo rígido minimiza las fluctuaciones a ✅ Flujo de trabajo sin fijadores: se acabaron los incómodos fijadores de pierna. La estabilidad de nuestro sistema permite un procedimiento más natural y ágil, que ahorra un valioso tiempo de quirófano. ✅ Eficiencia integrada: con la sierra eléctrica integrada directamente en el brazo rígido, obtienes una experiencia fluida de «posicionamiento y osteotomía integrados». La precisión no debería implicar complejidad. Es hora de superar las limitaciones de los sistemas flexibles y adoptar el poder de la estabilidad rígida. 🚀 Descubre la diferencia Sovajo. Vive el futuro de la cirugía ortopédica. #Orthopedics #SurgicalRobotics #MedTech #TKA #JointReplacement #HealthTech #Sovajo #DigitalHealth #OrthoSurgeon #Innovation #SoutheastAsiaMedTech
