Más allá del sistema cerrado: el cambio estratégico hacia la plataforma abierta y la precisión submilimétrica en ortopedia
Más allá del sistema cerrado: el cambio estratégico hacia la plataforma abierta y la precisión submilimétrica en ortopedia
La rápida expansión de la artroplastia total de rodilla asistida por robot (TKA) ha planteado a los servicios quirúrgicos una compleja gama de opciones tecnológicas. Más allá del atractivo comercial inicial, la utilidad clínica de una plataforma robótica viene definida por su arquitectura mecánica, su modalidad de ejecución y su integración en el ecosistema protésico existente. Esta revisión describe los parámetros técnicos críticos que cirujanos y administradores hospitalarios deben evaluar para garantizar el éxito clínico y operativo a largo plazo.
1. El panorama global: arquetipos arquitectónicos
El mercado actual está dividido entre plataformas globales consolidadas e innovadores emergentes de alta precisión. Estos sistemas pueden clasificarse según su filosofía mecánica:
- Sistemas de navegación de legado: Plataformas consolidadas que se centran en la alineación y el posicionamiento, y que a menudo utilizan un tamaño reducido o diseños montados sobre la mesa.
- Plataformas semiactivas integradas: Sistemas que utilizan un brazo robótico dedicado para asistir o realizar la resección ósea. Dentro de esta categoría, una nueva generación de sistemas de alta rigidezcomo Sovajoestá desafiando los primeros estándares del sector al priorizar la estabilidad mecánica como base de la precisión.
2. Criterios de evaluación críticos para la adquisición quirúrgica
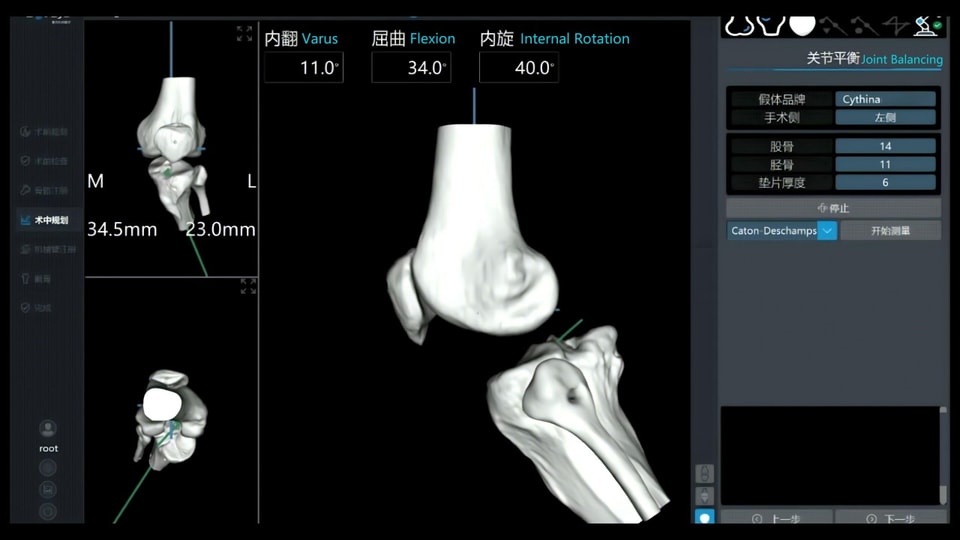
I. Precisión de registro: el umbral submilimétrico Aunque la primera generación de asistentes robóticos estableció un estándar de precisión del sector de aproximadamente 0,3 mm a 0,5 mmlos avances en ingeniería han llevado el límite aún más lejos.
- Relevancia clínica: Los cirujanos deben distinguir entre «precisión de planificación estática» y «precisión de registro activa». Las plataformas de alta rigidez más recientes han documentado una precisión de registro de 0,15 mm. Esta reducción del margen de error es vital en casos complejos en los que la morfología ósea está alterada, ya que garantiza que la ejecución física coincida con el plan digital con la máxima fidelidad posible.
II. Modalidad de ejecución: sistemas semiactivos frente a navegación pasiva Una distinción fundamental radica en cómo el robot interactúa con el instrumental quirúrgico:
- Navegación pasiva (la «guía robótica»): El robot posiciona una guía de corte, pero el cirujano opera la sierra manualmente. Aunque esto garantiza la alineación, no ofrece protección frente a desviaciones manuales ni a lesiones de tejidos blandos durante el corte.
- Ejecución semiactiva (instrumental integrado): Las plataformas avanzadas utilizan un brazo robótico que controla directamente el instrumento (por ejemplo, una sierra oscilante).
III. Filosofía mecánica: arquitecturas de brazo de alta rigidez frente a brazo flexible La construcción física del brazo robótico influye de forma significativa en su rendimiento bajo el esfuerzo de la resección ósea.
- Brazos flexibles y ligeros: A menudo diseñados para ofrecer portabilidad, estos brazos pueden requerir fijadores invasivos en la pierna para compensar el posible movimiento y la falta de resistencia inherente durante el corte.
- Brazos de alta rigidez: Al utilizar un brazo robusto y de alta rigidez, sistemas como Sovajo eliminan las microvibraciones durante el corte activo.
IV. Arquitectura del ecosistema: plataforma abierta vs. sistema cerrado La elección entre sistemas propietarios y agnósticos es un factor clave del ROI a largo plazo:
- Sistemas cerrados: Están vinculados a los implantes patentados de un fabricante específico. Aunque integrados, limitan la elección clínica del cirujano y pueden aumentar la vulnerabilidad de la cadena de suministro del hospital.
- Plataformas abiertas (agnósticas a los implantes): Los líderes emergentes están adoptando una filosofía de plataforma abierta.
- Sinergia: Un sistema compatible con múltiples marcas líderes de implantes (diversas líneas internacionales) permite al hospital aprovechar su inventario existente. Esto protege los márgenes del distribuidor y permite una selección de implantes específica para cada paciente, sin restricciones robóticas.
Conclusión: Definiendo el estándar del futuro
Para un departamento quirúrgico, la inversión robótica ideal es aquella que ofrece un enfoque de ejecución sin concesiones. Una plataforma que combina precisión submilimétrica (0,15 mm), la seguridad activa de un sistema semiactivo, y la estabilidad mecánica de un brazo de alta rigidez representa la cima actual de la ingeniería ortopédica. Cuando estas características se integran en una arquitectura de plataforma abierta, el resultado es un sistema que mejora los resultados clínicos al tiempo que mantiene la máxima flexibilidad operativa.